|
GETTER ROBOTs (Classic) 3D MODEL (MAGGIO 2019)
|

|
|
Getta Robot o Getter Robot (conosciuta in italia anche come Space Robot) è una serie televisiva di 51 episodi, realizzata nel 1972 da Toei Animation su soggetto di Gō Nagai, che nello stesso anno, con la collaborazione di Ken Ishikawa, ne trasse anche un manga.
Getter Robot è stato il primo robot componibile e trasformabile nella storia dell'animazione giapponese, con una squadra di piloti che guida più veicoli in grado di combinarsi in un unico Robot. Il nome stesso del robot ricorda tale caratteristica (in giapponese la parola "gattai" significa infatti "unione" o "trasformazione"). Getter Robot riscosse un significativo successo che portò alla realizzazione di numerosi seguiti (Getter Robot G, Getter Robot Go,Shin Getter Robot) e remake (Getter Robot– The Last Day, Neo Getter Robot, Getter Robot re:model ecc.) e fornì l'ispirazione per molte altre serie su robot componibili. |
Getta Robot or Getter Robot (also known in Italy as Space Robot) is a television series of 51 episodes, made in 1972 by Toei Animation based on a subject by Gō Nagai, who in the same year, with the collaboration of Ken Ishikawa, also drew a manga.
Getter Robot was the first modular and transformable robot in the history of Japanese animation, with a team of pilots who drive multiple vehicles able to combine into a single Robot. The very name of the robot recalls this characteristic (in Japanese the word "gattai" means "union" or "transformation"). Getter Robot enjoyed significant success which led to the creation of numerous sequels (Getter Robot G, Getter Robot Go, Shin Getter Robot) and remake (Getter Robot - The Last Day, Neo Getter Robot, Getter Robot re: model etc.) and provided the inspiration for many other modular robot series. |
|
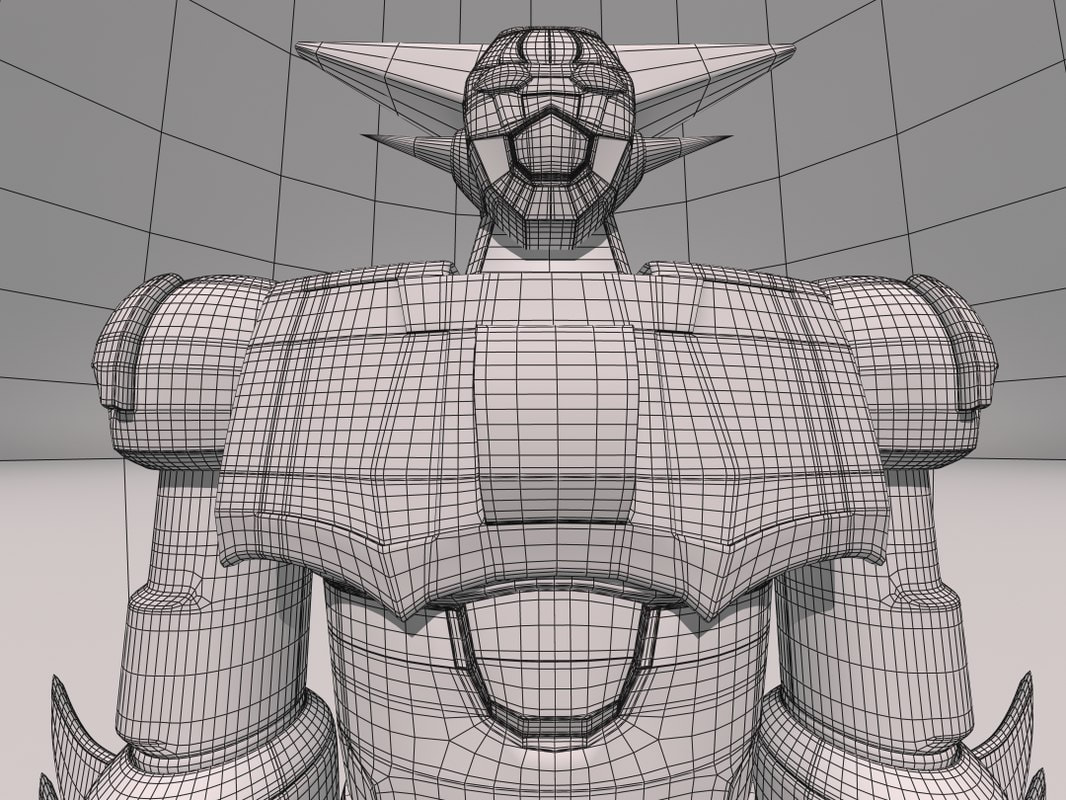
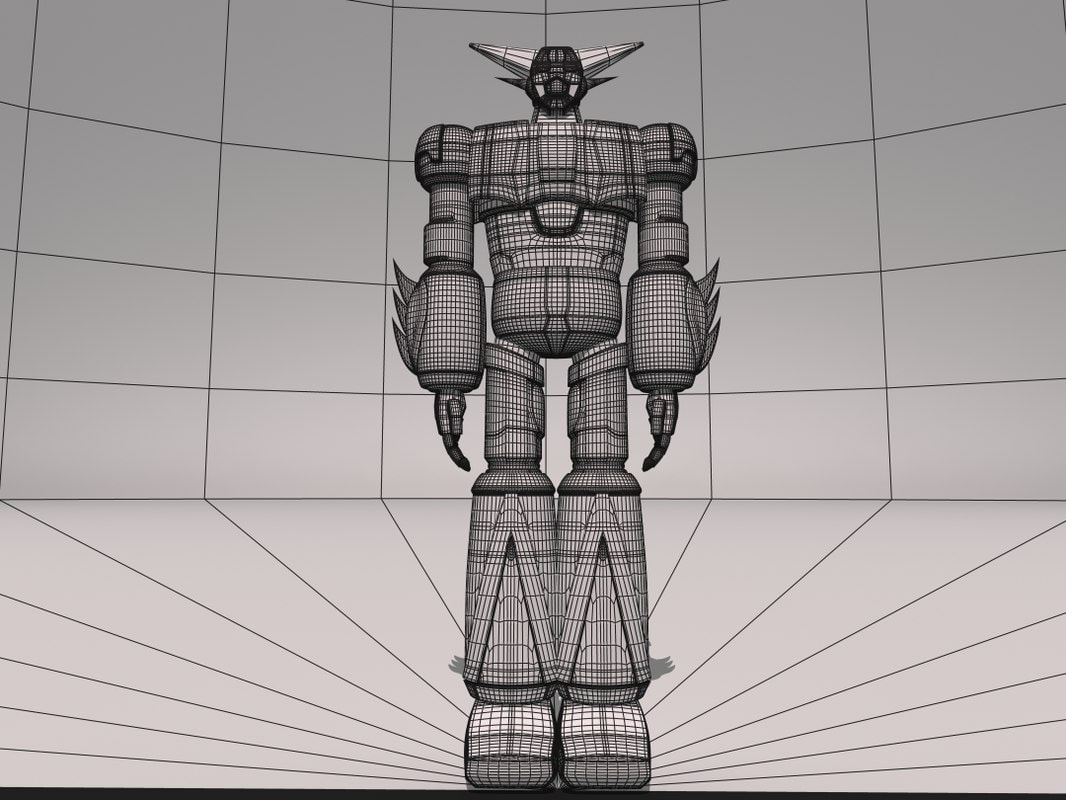
GETTER ONE
Getter One (o Getta 1) è la prima configurazione del Getta Robot e viene pilotato da Ryo. Progettato per l'esplorazione dei cieli il Getta 1 è il robot più utilizzato e anche il più potente dei tre disponibili grazie ad una maggiore versatilità e al tremendo Raggio Getta che sprigiona dal suo torso. E' in grado di volare grazie alle Ali Getta. Il Getta 1 è formato dalle tre navette Getta che si uniscono nell'ordine seguente : Getta Aquila : testa e torso superiore del robot; Getta Giaguaro : torso inferiore del robot; Getta Orso : gambe del robot. |
GETTER ONE
Getter One (or Getta 1) is the first configuration of the Getta Robot and is piloted by Ryo. Designed for the exploration of the skies, the Getta 1 is the most used robot and also the most powerful of the three available thanks to greater versatility and the tremendous Getta Ray that emanates from its torso. It is able to fly thanks to the Wings Getta. The Getta 1 is made up of the three Getta shuttles that join together in the following order: Getta Aquila: head and upper torso of the robot; Getta Jaguar: lower torso of the robot; Getta Bear: Robot Legs. |




|
GETTER TWO
Getter Two (o Getta 2) è la seconda configurazione del Getta Robot, pilotata da Hayato. Progettato per l'esplorazione della superfice e quella sotterranea, il Getta 2 presenta un design slanciato e sottile per maggiore velocità ed agilità. La mano desstra è sostituita con una pinza, mentre il braccio sinistro termina con una trivella perforante. Il Getta 2 è formato dalle tre navette Getta che si uniscono nell'ordine seguente : Getta Giaguaro : testa e torso superiore del robot; Getta Orso : torso inferiore del robot; Getta Aquila : gambe del robot. |
GETTER TWO
Getter Two (or Getta 2) is the second configuration of the Getta Robot, piloted by Hayato. Designed for surface and underground exploration, the Getta 2 features a sleek, slim design for greater speed and agility. The right hand is replaced with a forceps, while the left arm ends with a perforating auger. The Getta 2 is made up of the three Getta shuttles that join together in the following order: Getta Jaguar: head and upper torso of the robot; Getta Bear: lower torso of the robot; Getta Eagle: Robot Legs. |



|
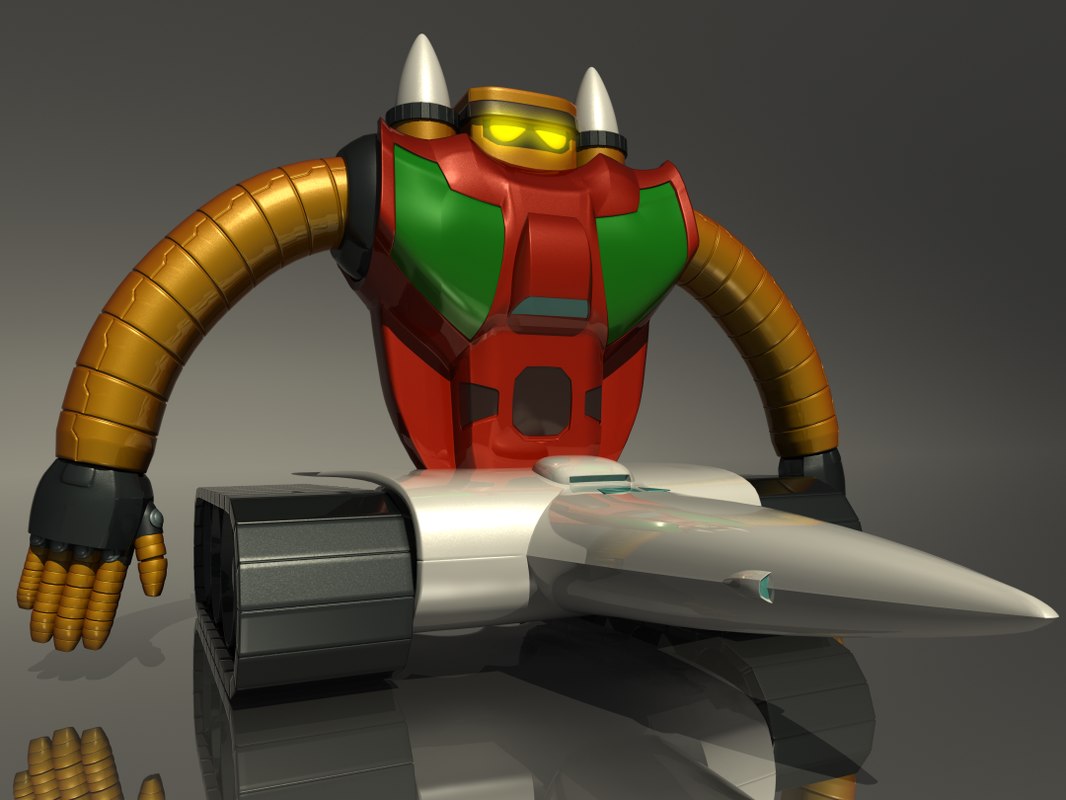
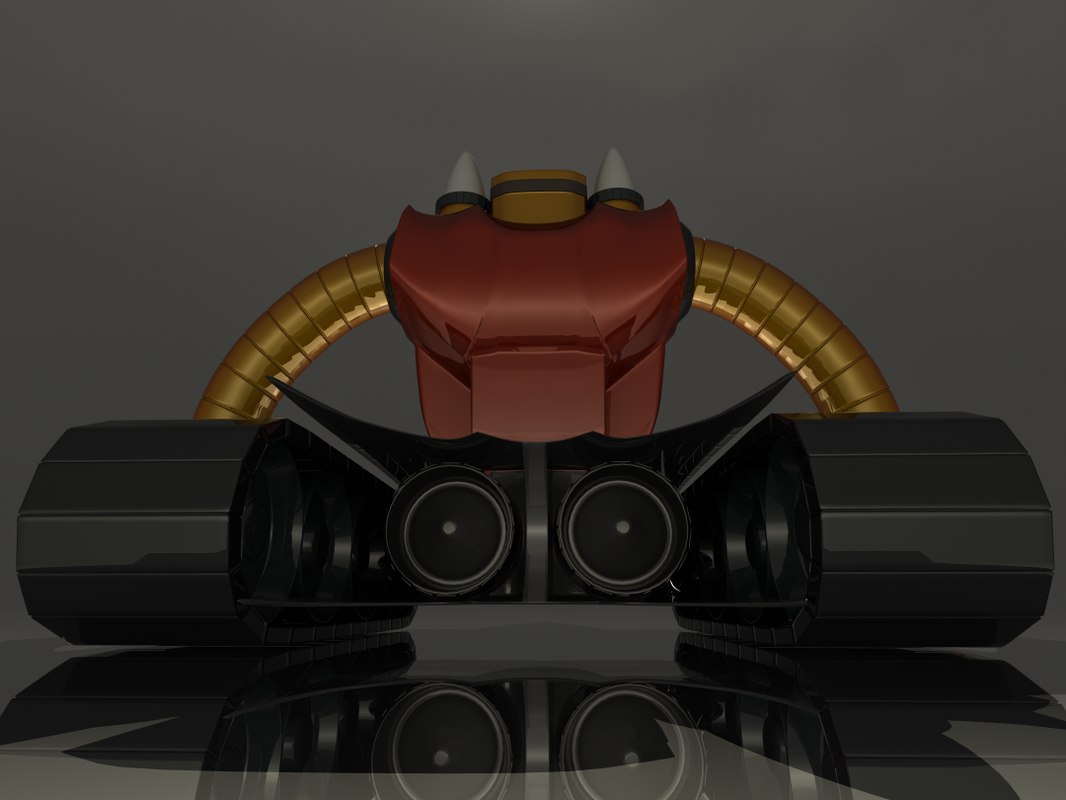
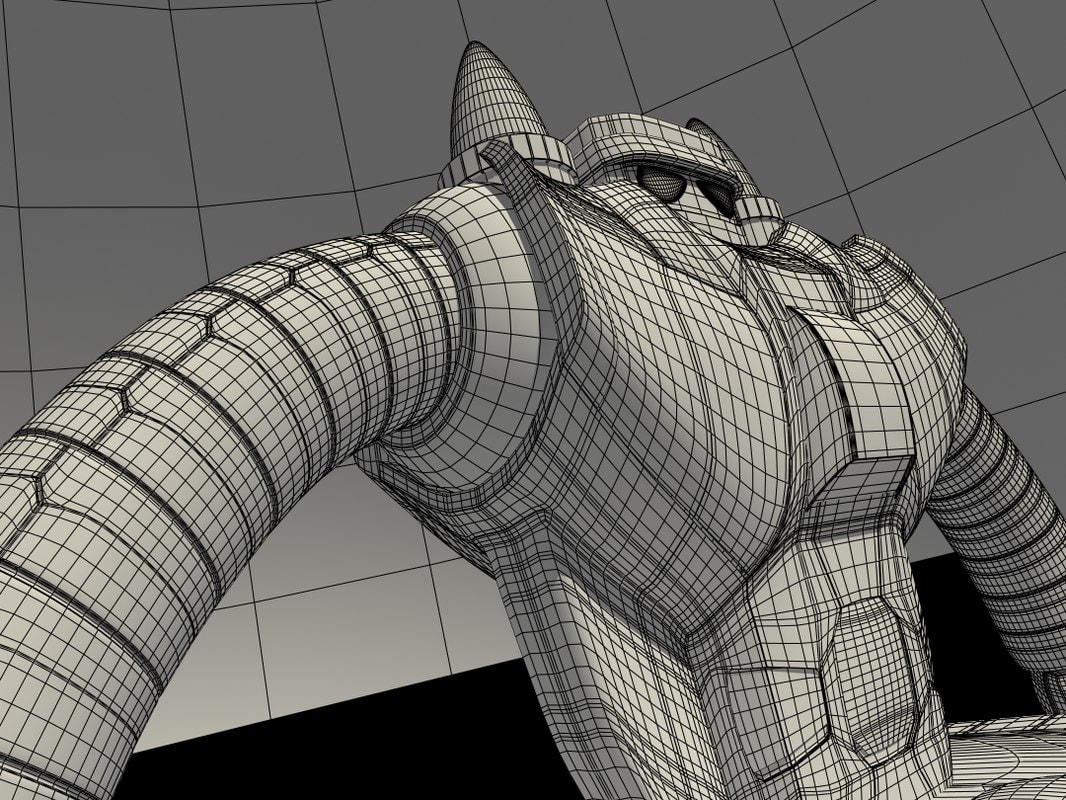
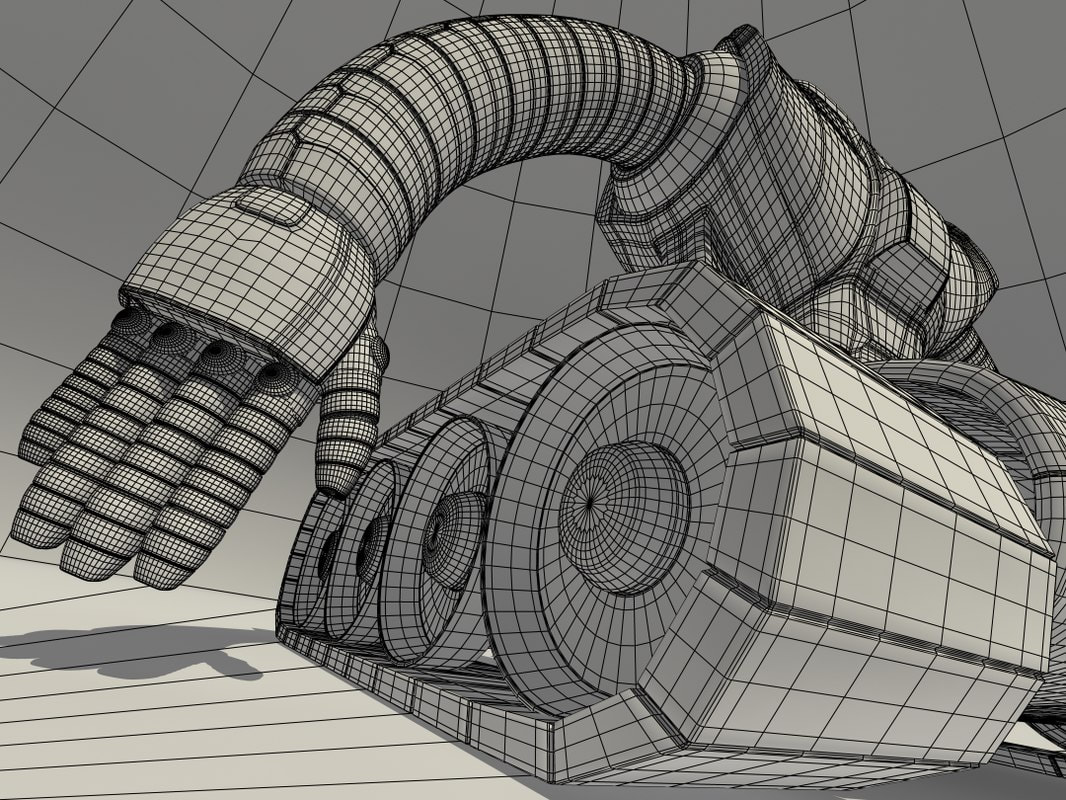
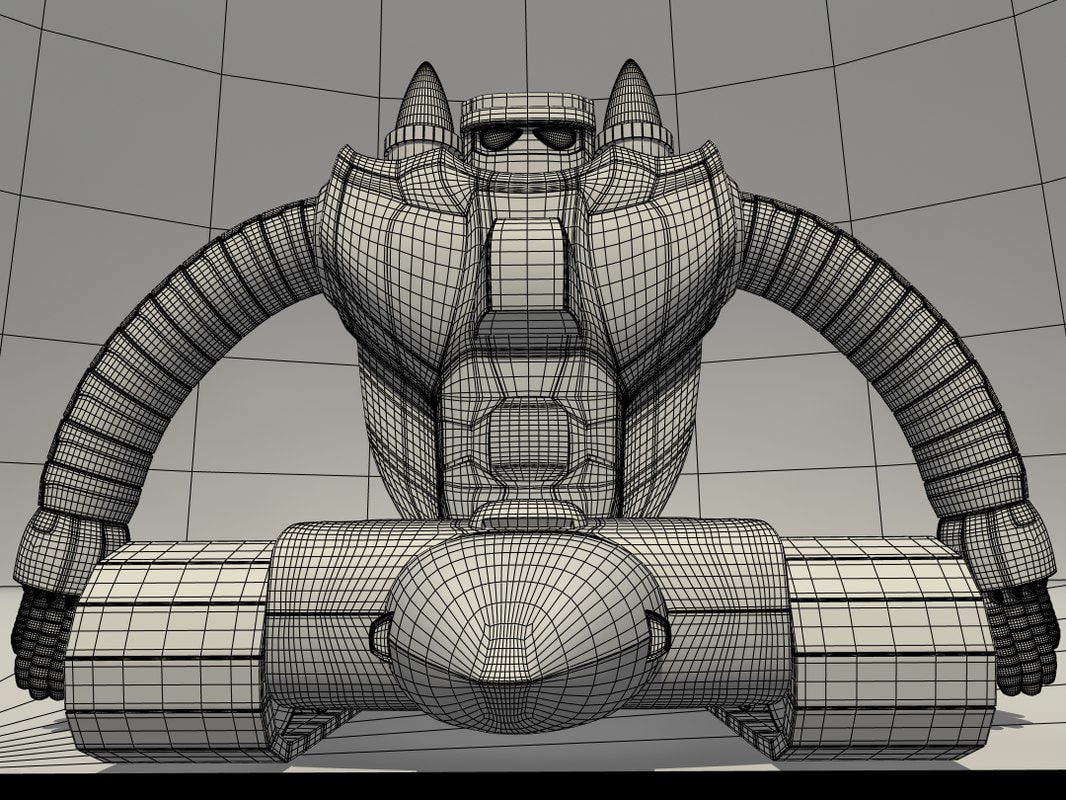
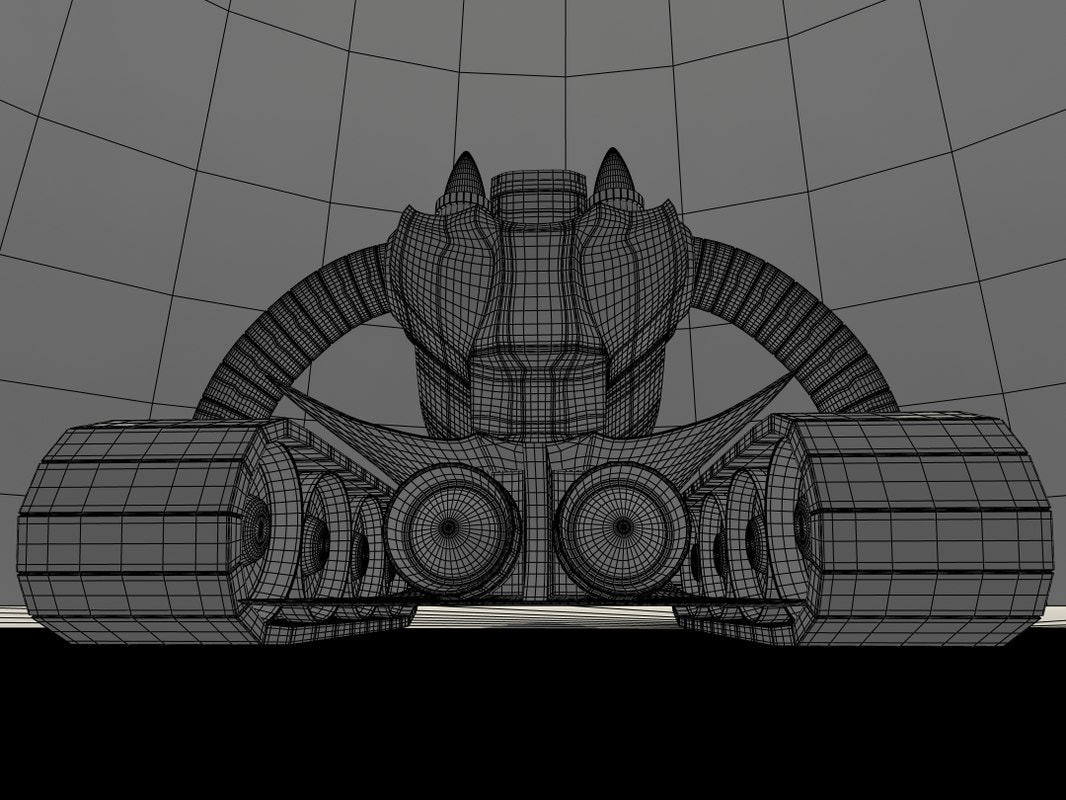
GETTER THREE
Getter Three (o Getta 3) è la terza ed ultima configurazione del Getta Robot, pilotata da Musashi. Progettato per operare nell'ambiente sottomarino, il Getta 3 è caratterizzato da un design massiccio, presentando un modulo cingolato al posto delle gambe. Il Getta 3 è formato dalle tre navette Getta che si uniscono nell'ordine seguente : Getta Orso : testa del robot; Getta Aquila : torso del robot; Getta Giaguaro : base cingolata (al posto delle gambe). |
GETTER THREE
Getter Three (or Getta 3) is the third and final configuration of the Getta Robot, piloted by Musashi. Designed to operate in the underwater environment, the Getta 3 features a massive design, featuring a tracked module instead of legs. The Getta 3 is made up of the three Getta shuttles that join together in the following order: Getta Bear: robot head; Getta Aquila: robot torso; Getta Jaguar: crawler base (instead of legs). |